

如何从动物化石中提取可靠的运动信息,一直是古生物学研究的难点。近期,中国科学院南京地质古生物研究所王博团队等选取白垩纪中期已灭绝的黑帝斯蚁作为研究对象,提出了一套用于重建古无脊椎动物运动的普适性研究方法,相关成果近期发表在《国家科学评论》(National Science Review)。
近年来,随着3D打印、计算机仿真等新技术的发展,古动物的定量运动重建技术取得显著进展。目前相关运动重建研究多集中于古脊椎动物,例如恐龙的步态和取食、翼龙的飞行、古鱼类的游泳等,而对古无脊椎动物的研究相对较少。主要原因在于无脊椎动物缺少内骨骼、外骨骼的立体形态难以精确恢复、相关软组织数据缺乏以及运动方式更为复杂等等。
黑帝斯蚁出现于距今约1亿年前,是目前已知发现最早的蚂蚁之一,与现在所有的现生蚂蚁没有直接的亲缘关系。黑帝斯蚁以其独特的头部结构被广泛研究,例如突出的角结构和镰刀状的上颚结构。
此次王博团队联合中山大学吴嘉宁团队和包童团队,选取了一类更加特化的黑帝斯蚁——刀颚蚁作为研究对象。根据先前对于化石中刀颚蚁样本的解剖数据,推测刀颚蚁可能依靠上颚沿水平面的垂直方向运动配合角结构进行捕食,然而这一假说存在不确定性(仅有静态信息),需要通过获取动态信息进行定量验证。
为了解决该问题,研究人员分五个步骤对刀颚蚁的上颚展开运动重建。首先选取两块不同上颚空间构型的刀颚蚁琥珀。其次,对化石进行三维建模,完整地复原了刀颚蚁上颚的立体形态结构和解剖结构,获得两个高质量的刀颚蚁上颚3D模型。第三,根据获得的3D模型,将隐藏在化石中的运动线索进行检测和数字化,通过比较两种空间姿态的刀颚蚁上颚三维模型,量化分析得到了上颚的三轴运动特性。第四,通过生物力学和机器(动力仿真)实验验证运动学合理性,得到三轴转动更适合于刀颚蚁提高捕食成功率的结论。最后,生态复原刀颚蚁的捕食情景。
本次研究提出了一种古无脊椎动物运动重建的系统性分析方法。这种方法最终通过机器人演示提供了对古无脊椎动物的运动学复原,为深入理解古无脊椎动物的运动方式、生态习性等打开了定量验证的大门。
本研究得到了国家自然科学基金委和中国科学院的项目支持。
论文相关信息:Wang Zixin, Zhang Wei, Li Jiahao, Ji Wang, Yang Yunqiang, Bao Tong*, Wu Jianing*, Wang Bo*, 2023. Animating fossilized invertebrates by motion reconstruction. National Science Review, nwad268, https://doi.org/10.1093/nsr/nwad268.
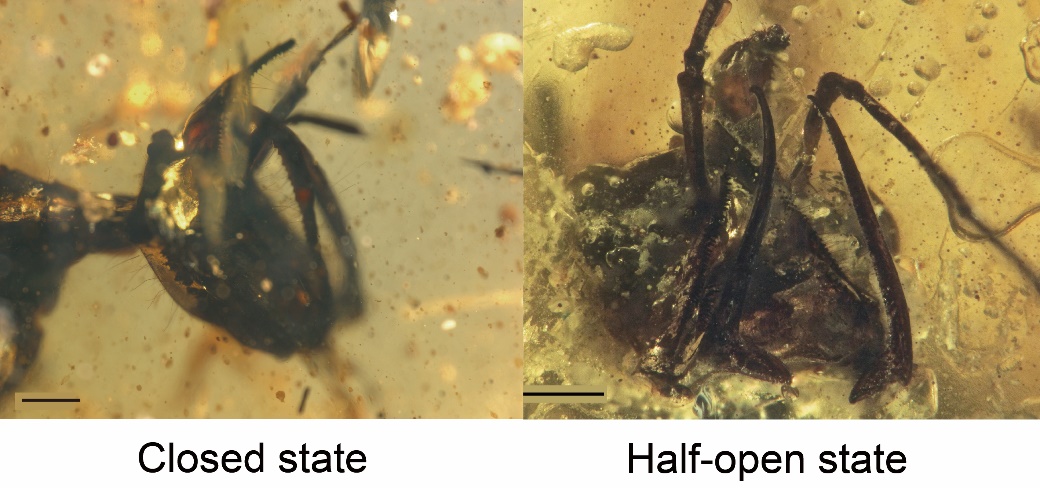
图1 两块不同空间形态的琥珀化石
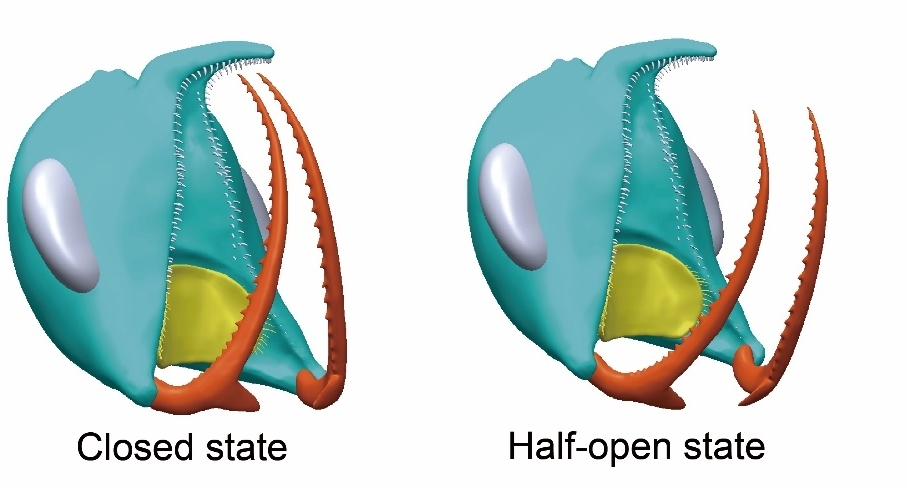
图2 不同空间形态的三维模型
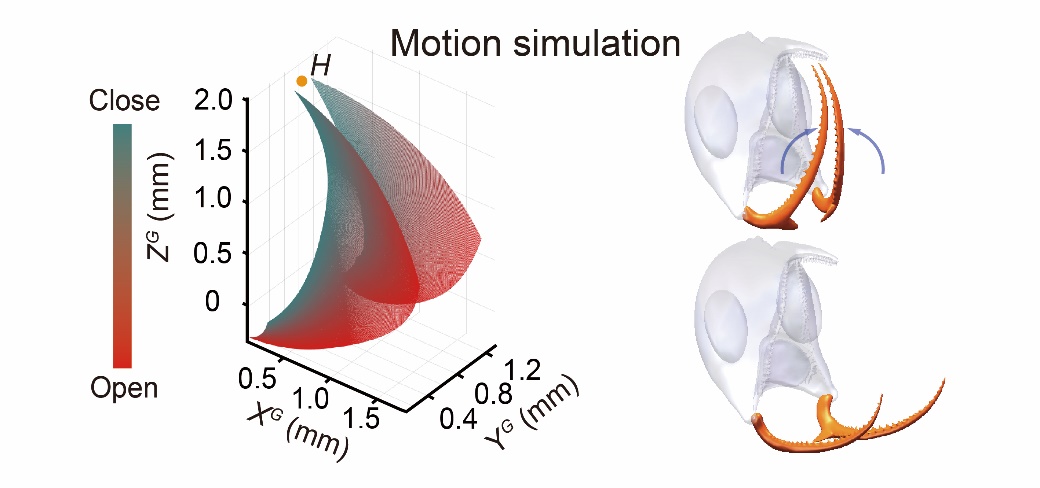
图3 量化分析得到了上颚的三轴运动特性
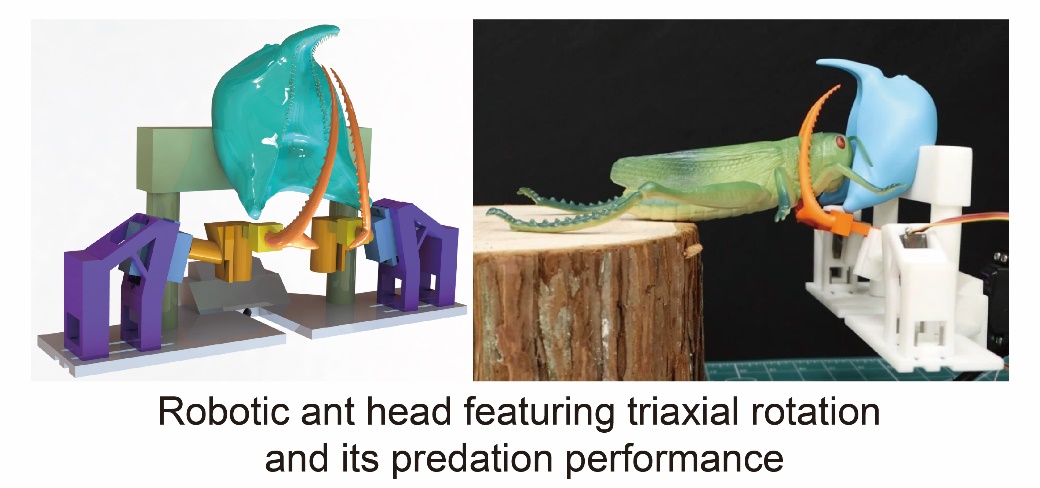
图4 生物力学和机器(动力仿真)实验验证运动学合理性

图5 生态重建刀颚蚁捕食情景

版权所有 © 中国科学院南京分院 苏ICP备05004321号
网站标识码:bm48000014 京公网安备110402500047号
地 址:南京市北京东路39号 邮政编码:210008
联系电话:025-83367159 电子邮箱:office@njbas.ac.cn

南京分院
微信公众号

